
The nudging car on road to completion
In the future, your car could nudge you to drive safer. MeBeSafe is developing a nudge in the car that scans the surroundings and helps you make the right decisions. For the first time, all the components are being put together.
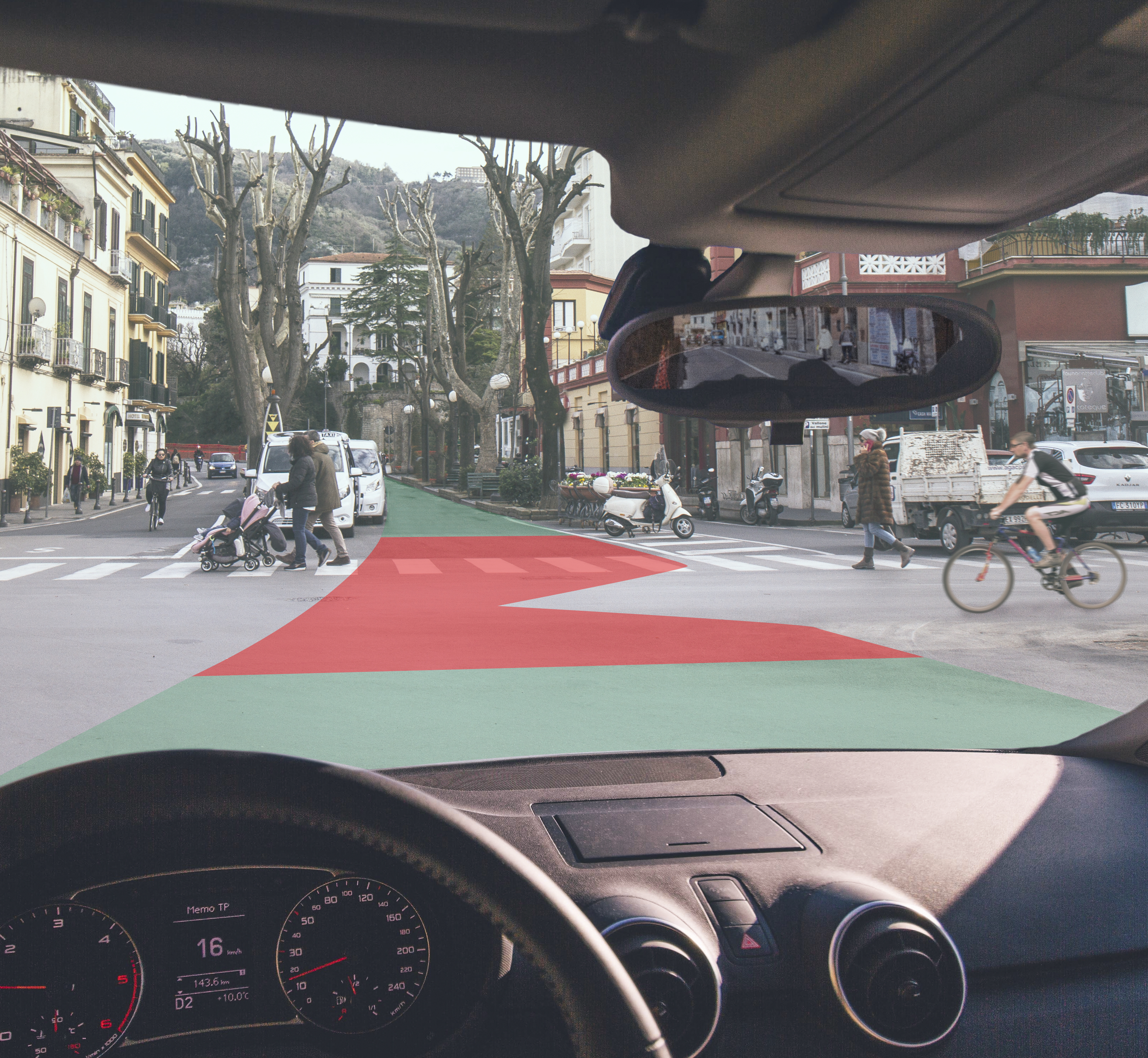
A lot of accidents occur in intersections. Especially between cars and bikes. Car drivers often fail to spot an approaching cyclist, and the accident is a fact. MeBeSafe envisions a car that can nudge drivers to reduce their speed and direct their attention towards the cyclist when they approach such a situation. That is, when they approach a risky intersection. This idea has been developed from a lot of angles, and is finally about to be built into a car. For this to work, the car needs to know when an intersection actually is dangerous.
And how could the car possible know that? Well, by using lots of input data and advanced calculations, of course! There are two ways this problem can be tackled. The car could use previous assessments of how dangerous each intersection is – and nudge the drivers to get more aware when they approach a known red spot. It could also monitor the entire situation and spot the cyclists first. Both of these approaches will be used.
In the first test phase, only pre-made assessments of each intersection will be used. There is of course a lot of information about where accidents happen, so this would work. But only in general terms. Such a nudge can make drivers more likely to reduce speed and look for cyclists each time they approach a dangerous intersection – but not even more so when a cyclist is actually approaching. Therefore, a second step will check the actual surroundings for what is actually happening. All road users will be monitored, and an immediate risk will be calculated – not only just an average risk for each junction. Bram Bakker from Cygnify is one of the persons working with this, and he has found a lot of challenges.
“The first pre-made model is fairly simple. We know when the car is about to enter a dangerous intersection. But a lot of components got to work together for the second immediate step to work” Bram explains.
To get an immediate risk, the car will take information from cameras filming the situations, lidars scanning the surroundings and IMU-sensors measuring the orientation of the car. Using these inputs, a complete model of the surrounding area will be made digitally. In this model, all the various object will be identified. And when it is known which things are cyclists, pedestrians, cars or perhaps flagpoles, we have to model how they will behave. Will they move, and then in which direction? Using the data on how they have moved previously and how such objects use to move – it is possible to get such a prediction. And this prediction will form the basis for a risk assessment; how big is the risk of an accident occurring?
The two MeBeSafe partners TNO and Cygnify have built modules that can do all the parts of this complex workflow, but they have never been tried together before. If the driver is to be nudged as intended, the underlying modules have to talk to each others fast and efficient.
To test all of this, TNO and Cygnify hooked up their modules together to see how it would work. The result from one module is necessary for the next to perform its calculations, and this goes for all of them. So this really had to work. At first, a lot of data was generated to simulate the first input into the first module, just to ensure the flow. And this proved to work remarkably well. The data could of course be different in a real car with real sensors, so the system was put up in a car as well. And fortunately, these results were just as positive as Bram Bakker.
“It’s really exciting to see that all of these sophisticated hardware and software components can get together and work so well in a car. And it’s even more exciting to see that we are almost ready to try them in the field!” Bram exclaims.
Only a few tweaks have to be made to ensure a fully seamless interaction between the two systems. This is a step that must be made, but an extremely small step compared to what already has been done. And what that has been made, the functionality of the car will be tested.
Not only if the physics behind the nudging works, but also if it can really nudge the drivers. The first model with pre-made data will première in late September this year, and the full instantaneous one is on due course for November. Bram Bakker is really positive how this process has worked out.

“I’m so proud of the level of sophistication we have managed to achieve together. Not only in terms of scientific challenges, no, but also in the technical ‘we need to make this work in an actual vehicle’ challenges. Theory and practice coming together in the best possible way”
Read more about how the nudge will look here!